Bei der Ausrüstung - oder besser der Hardware – geht es zunächst um bestmögliche Stabilität. Je stabiler das System ist, desto präziser und dadurch auch schneller kann man palettieren.
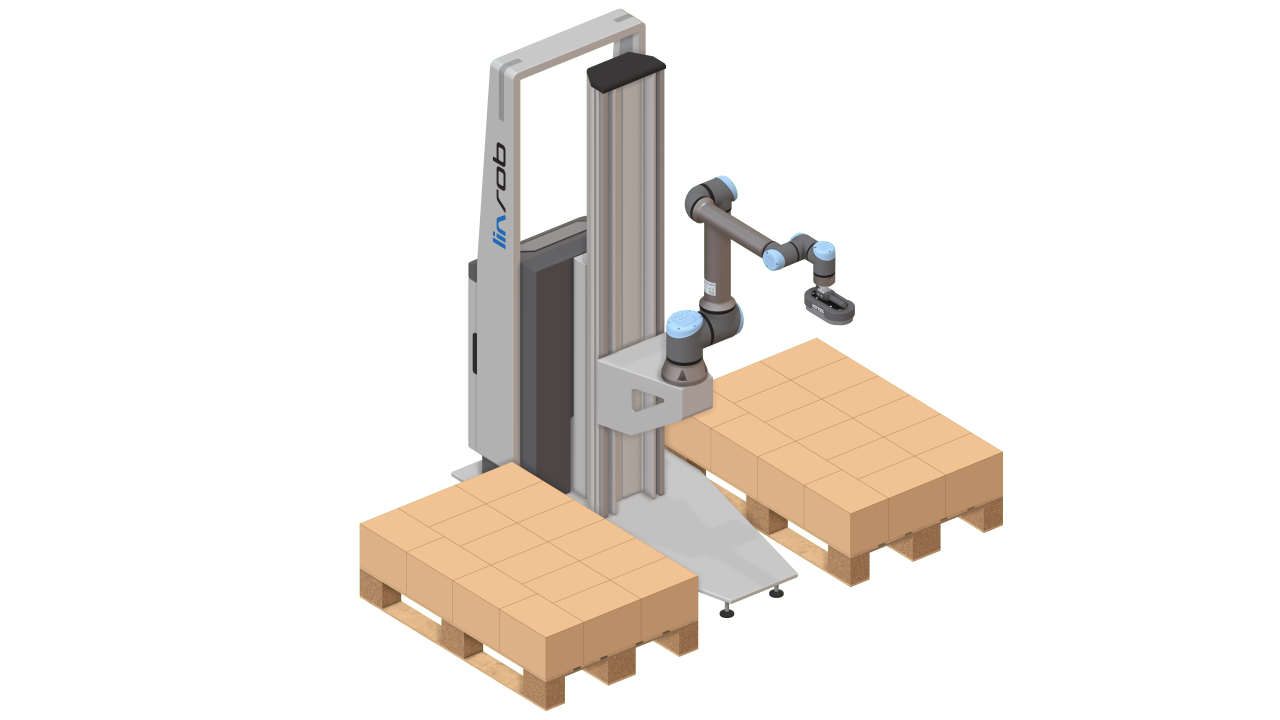
Bei aller Stabilität möchte man trotzdem so “schlank” wie möglich unterwegs sein. Unnötiges behindert nur. Ist zum Beispiel die Basis, auf der der Roboter steht zu breit, kann es passieren, dass ein Roboter oder Cobot mit größerer Reichweite benötigt wird - die Paletten stehen ja weiter weg vom Roboterfuß.
Und natürlich soll die Ausrüstung so lange wie möglich halten, auch wenn es mal rauer zugeht.
Setzen wir nun einen kleinen Roboter auf eine herkömmliche Hubsäule erreichen wir bei europäischen Standardgrößen zwar jede gewünschte Höhe verlieren aber deutlich an Präzision, Geschwindigkeit und Beschleunigung des Roboters. Dies liegt daran, dass die Instabilität mit jedem weiteren ausgefahrenen Profil im gesamten System zunimmt. Dadurch entsteht bei einer hohen Geschwindigkeit des Roboters eine starke Verbiegung der Hubsäule. Dies kann eine Verschiebung, der im Vorfeld kalibrierten Position, von bis zu 1 cm bedeuten. Wenn ein Roboter also eine Genauigkeit von 0,1 mm besitzt, verschlechtert sich diese in der Extremposition der Hubsäule um ein 100faches. Dadurch wird ein großer Puffer an Zeit nötig, um die Schwingungen der Säule auszugleichen. Im Normalfall hat man aber einen solchen Puffer nicht zur Verfügung.
Ganz im Gegensatz dazu sind unsere linrob Linearsysteme für hohe Geschwindigkeiten, Beschleunigungen und Gewichte ausgelegt und dass bei extremer Steifigkeit. So kann der Roboter selbst in großen Höhen mit voller Beschleunigung arbeiten. Ein weiterer Vorteil dabei ist, dass die Achsen kaum breiter sind als der Roboterfuß selbst, dadurch ermöglichen wir einen Aufbau mit geringster Stellfläche und maximaler Erreichbarkeit durch den Roboter. Und natürlich sind Linearroboter von linrob für einige hundert Kilo Traglast ausgelegt, so dass wir die für uns relativ geringen Gewichte beim Palettieren ohne Wimpernzucken wegstecken