The equipment - or rather the hardware - is first of all about the best possible stability. The more stable the system, the more precise and thus faster palletising can be.
Despite all the stability, you still want to be as "lean" as possible. Unnecessary things only hinder. If, for example, the base on which the robot stands is too wide, a robot or cobot with a longer reach may be needed - after all, the pallets are further away from the robot's base.
And of course, the equipment should last as long as possible, even if the going gets rough.
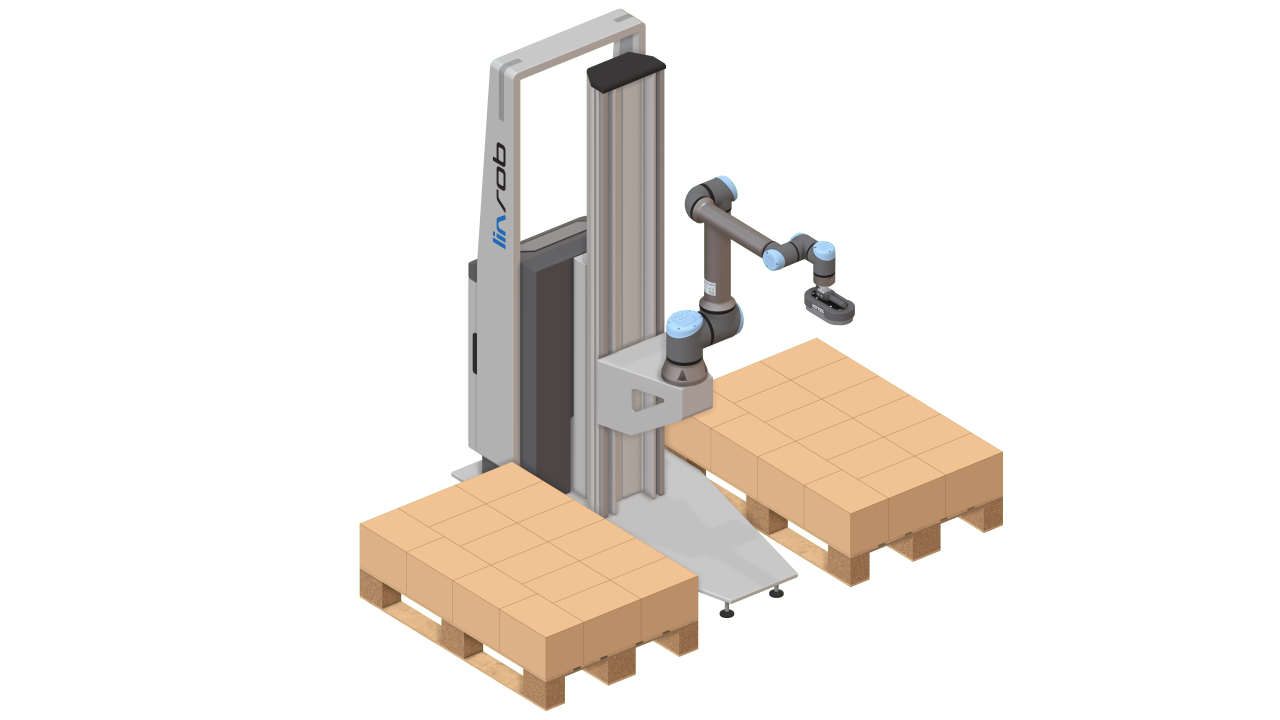
If we now place a small robot on a conventional lifting column, we can reach any desired height with European standard sizes, but we lose a lot in terms of precision, speed and acceleration of the robot. This is due to the fact that the instability increases with each further extended profile in the entire system. This results in a strong bending of the lifting column when the robot is moving at high speed. This can mean a displacement, of the pre-calibrated position, of up to 1 cm. So if a robot has an accuracy of 0.1 mm, this deteriorates 100-fold in the extreme position of the lifting column. This means that a large buffer of time is needed to compensate for the oscillations of the column. Normally, however, one does not have such a buffer available.
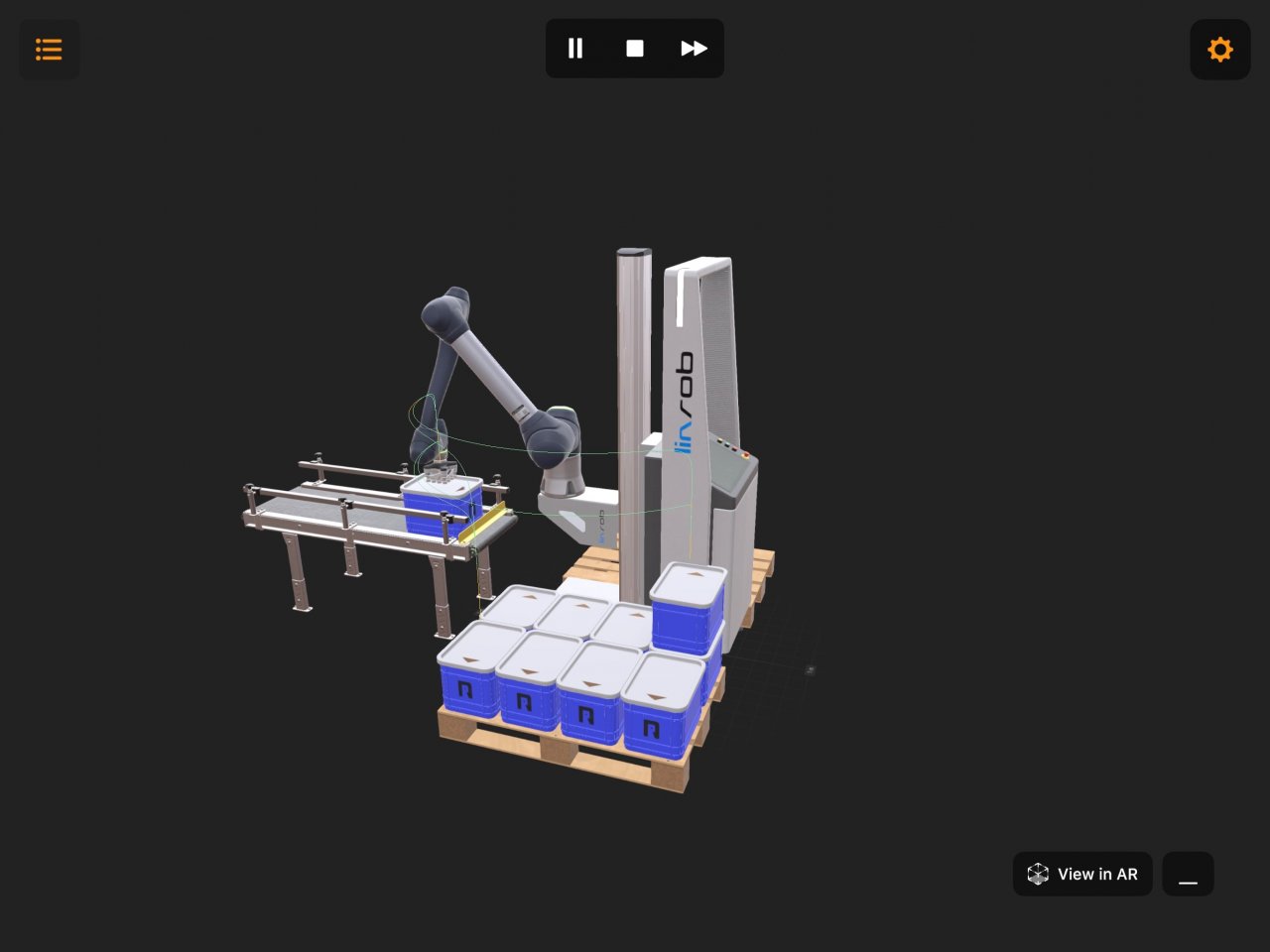
In contrast, our linrob linear systems are designed for high speeds, accelerations and weights, with extreme rigidity. This allows the robot to work at full acceleration even at great heights. Another advantage is that the axes are hardly wider than the robot base itself, which allows us to build a system with the smallest footprint and maximum accessibility for the robot. And of course linear robots from linrob are designed for a payload of several hundred kilos, so that we can handle the relatively low weights for palletising without batting an eyelid.